Picture taken by Huy Ha
I'm a Computer Science PhD student at Columbia University and a Student of New Faculty (SNF) at Stanford University. I have always been fascinated by the interaction between computers and the physical world. Branching out from this theme, I have explored Geometric/Probabilistic Algorithms, Mapping/Geographic Information Systems, and Camera Architecture/Computational Photography under various academic and industrial settings.
I'm fortunate to be advised by Professor Shuran Song. My research will focus on robotic manipulation and perception.
Learning random things has been the greatest source of pleasure for me, and I hope this will never stop. Recently, I have been studying the science of cooking in my free time.
Updates
- July 2024 UMI has been selected as Best Systems Paper Finalist at RSS 2024!
- May 2024 Two papers accepted to RSS 2024
- Apr 2023 Two papers accepted to RSS 2023
- Dec 2022 Got into NVIDIA Graduate Fellowship Finalist.
- Jun 2022 Iterative Residual Policy won the Best Paper Award at RSS 2022!
- May 2022 Iterative Residual Policy has been selected as Best Student Paper Finalist at RSS 2022!
- May 2022 DextAIRity has been selected as Best Systems Paper Finalist at RSS 2022!
- May 2022 Two papers accepted to RSS 2022
- Jul 2021 GarmentNets has been accpeted to ICCV 2021
- Jan 2021 I started my PhD at Columbia University, advised by Prof. Shuran Song
- Jan 2020 I started working for Nuro's Mapping and Localization Team
Research
Cheng Chi*,
Zhenjia Xu*,
Chuer Pan,
Eric Cousineau,
Ben Burchfiel,
Siyuan Feng,
Russ Tedrake,
Shuran Song
Robotics: Science and Systems (RSS) 2024
Best Systems Paper Finalist •
Website •
ArXiv •
Twitter
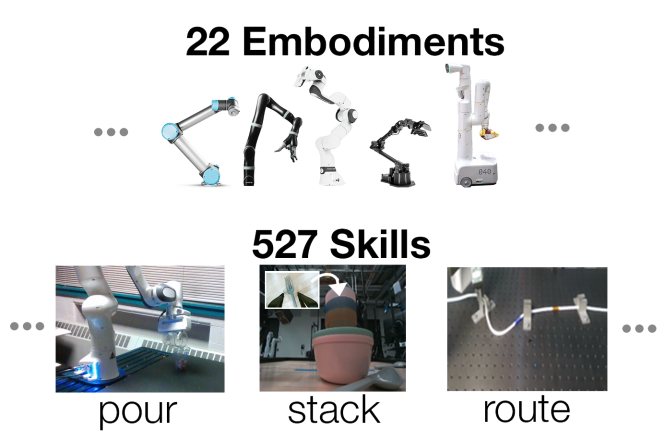 Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Abhishek Padalkar et al
International Conference on Robotics and Automation (ICRA) 2024
Best Paper Award •
Website •
ArXiv
Cheng Chi,
Siyuan Feng,
Yilun Du,
Zhenjia Xu,
Eric Cousineau,
Ben Burchfiel,
Shuran Song
Robotics: Science and Systems (RSS) 2023
Website •
ArXiv •
Twitter
 XSkill: Cross Embodiment Skill Discovery
XSkill: Cross Embodiment Skill Discovery
Mengda Xu,
Zhenjia Xu,
Cheng Chi,
Manuela Veloso,
Shuran Song
Conference on Robot Learning (CoRL) 2023
Website •
ArXiv
Zhenjia Xu,
Zhou Xian,
Xingyu Lin,
Cheng Chi,
Zhiao Huang,
Chuang Gan,
Shuran Song
Robotics: Science and Systems (RSS) 2023
Website •
ArXiv •
Video
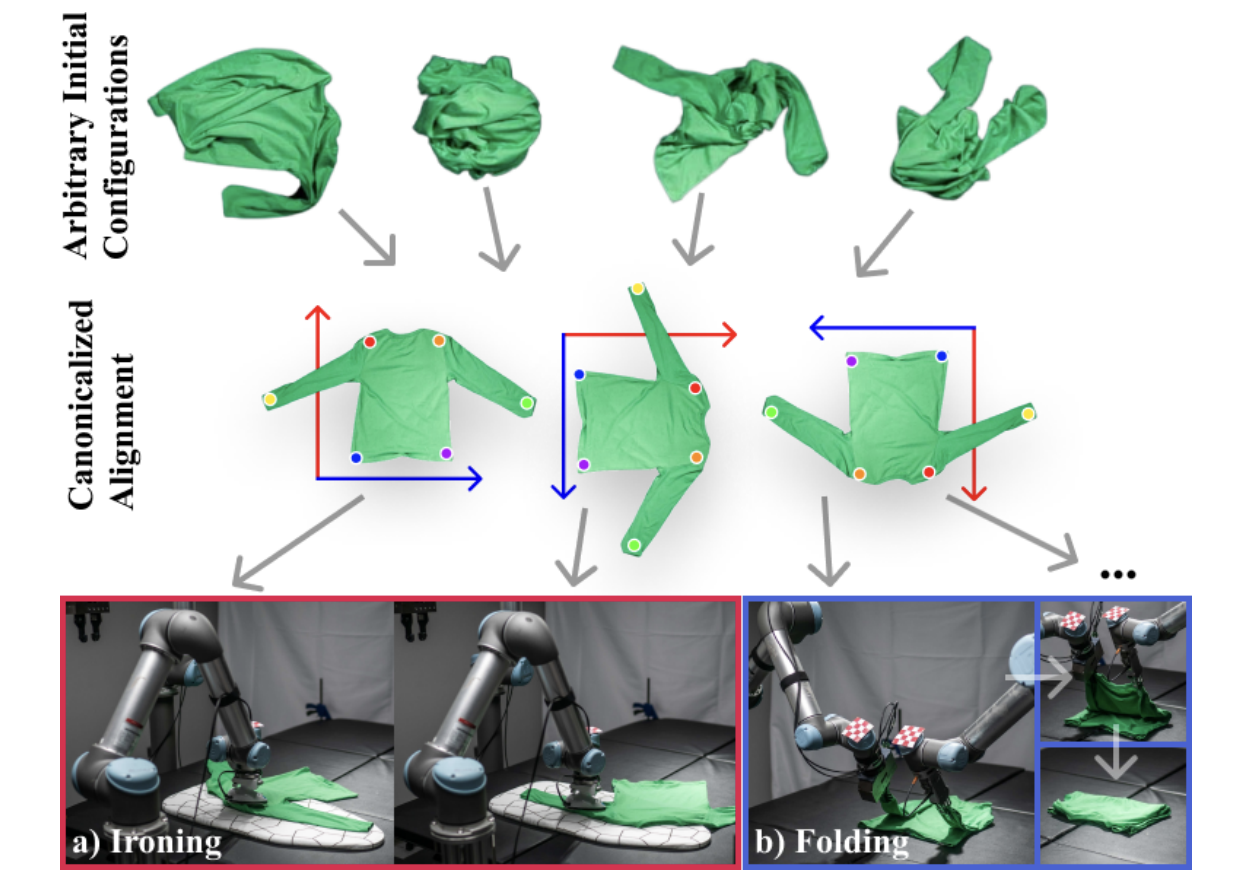 Cloth Funnels: Canonicalized-Alignment for Multi-Purpose Garment Manipulation
Cloth Funnels: Canonicalized-Alignment for Multi-Purpose Garment Manipulation
Alper Canberk,
Cheng Chi,
Huy Ha,
Ben Burchfiel,
Eric Cousineau,
Siyuan Feng,
Shuran Song
International Conference on Robotics and Automation (ICRA) 2023
Website •
ArXiv •
Video
Cheng Chi,
Benjamin Burchfiel,
Eric Cousineau,
Siyuan Feng,
Shuran Song,
Robotics: Science and Systems (RSS) 2022
Best Paper Award •
Best Student Paper Finalist •
Website •
ArXiv •
Video
Zhenjia Xu,
Cheng Chi,
Benjamin Burchfiel,
Eric Cousineau,
Siyuan Feng,
Shuran Song,
Robotics: Science and Systems (RSS) 2022
Best Systems Paper Finalist •
Website •
ArXiv •
Video
Cheng Chi, Shuran Song
The IEEE International Conference on Computer Vision (ICCV) 2021
Website •
ArXiv •
Video
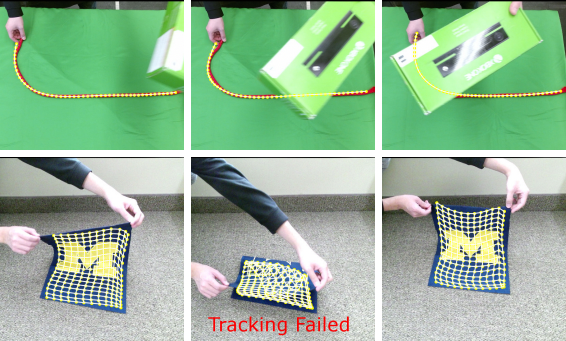 Occlusion-robust Deformable Object Tracking without Physics Simulation
Occlusion-robust Deformable Object Tracking without Physics Simulation
Cheng Chi, Dmitry Berenson
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2019
ArXiv •
Github •
Video